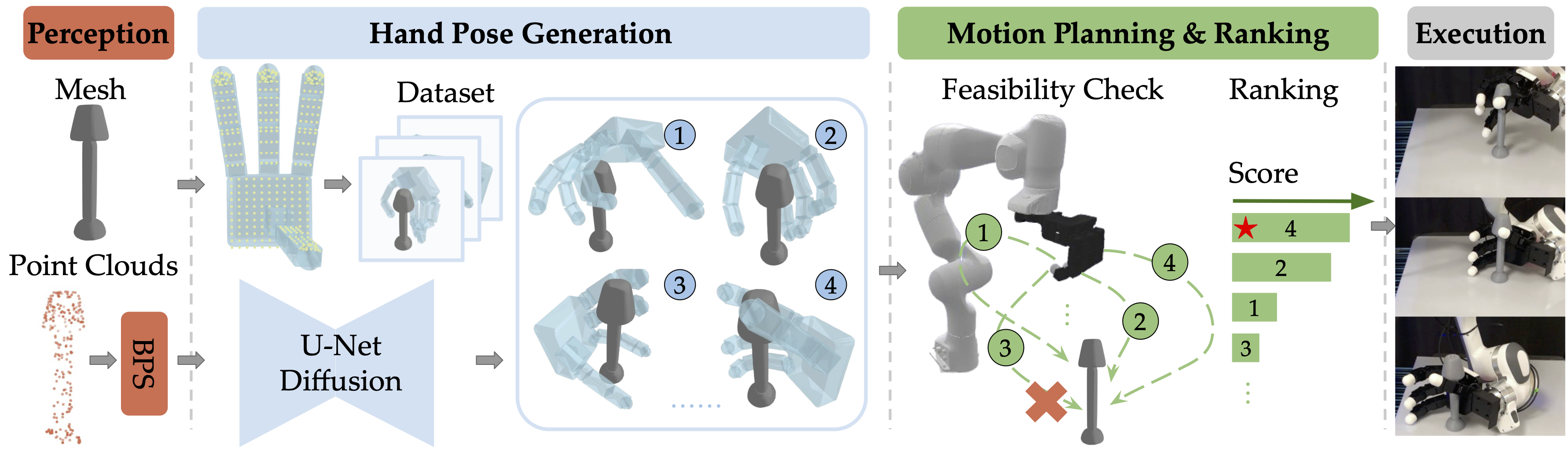
DexNoMa: Learning Geometry-Aware Nonprehensile Dexterous Manipulation
Abstract
NOTE: A tag on the index finger of the Allegro Hand in our recorded experiments videos could reveal personal information. To preserve double-blind review, we have obscured this tag with a black box in every video on our website.
Experiments
Execution with DexNoMa
The vidoes below are rollouts of DexNoMa over 8 3D-printed objects and 6 off-the-shelf daily objects. We test three pushing directions for each of the object.
Direction 1
Direction 2
Direction 3
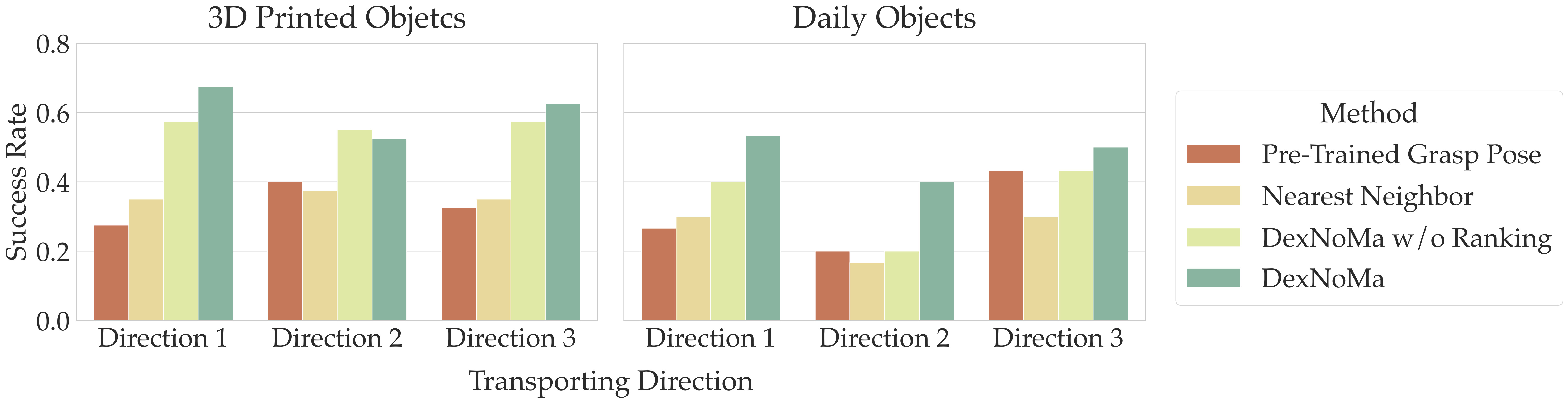
Baseline Comparision
We compare DexNoMa with the following methods.
i. Pre-Trained Grasp Pose: We use a pre-trained grasp synthesis model using NeRF. For each object, we train a NeRF representation, then query their pre-trained model for a grasp.
ii. Nearest Neighbor: Given a test object, we find the training object with the most similar BPS representation (in terms of Euclidean distance) and retrieve its associated hand poses. We then do the same motion planning pipeline as in DexNoMa.
ii. DexNoMa w/o Ranking: An ablation that excludes analytical ranking of hand poses (ignores Eq. 3) and executes a random feasible pose.
DexNoma
Pre-trained Grasp Pose
DexNoma
Nearest Neighbor
Multi-step Planning
DexNoMa can be used to perform multiple pushes. The videos below show two multi-step pushing sequences using DexNoMa. The robot uses two different hand poses to push the 3D-printed vase in the left video, as the first hand pose may not be ideal for the second hand pose, which shows the benefit of re-planning.
Failure Modes
DexNoMa still exhibits several limitations and failure modes.
i. Some rollouts are with nearly collision with our method. However, our evaluation metrics for real world experiments doesn't quite take such collision into consideration, which may potentially cause damage to the Allegro Hand.
ii. Our method fails with object toppling. However, since our focus is on nonprehensile hand pose generation, we didn't inverstigate too much into the toppling casued by factors such as firction, center of mass etc. We leave a more detailed investigation of how physical properties influence dexterous nonprehensile manipulation as future work.
Nearly Collision
Toppling